前言
opencv在图像处理中使用广泛,许多常见的应用场景例如人脸识别,车牌识别等都是基于opencv开发的。本文是学习opencv api的一些笔记。
感兴趣的朋友欢迎加入学习小组QQ群: 193765960。
版权归作者所有,如有转发,请注明文章出处:https://xiaodanchen.github.io/archives/
Mat-基本图像容器
Mat官方解释
教程
基本上讲 Mat 是一个类,由两个数据部分组成:矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和一个指向存储所有像素值的矩阵(根据所选存储方法的不同矩阵可以是不同的维数)的指针。矩阵头的尺寸是常数值,但矩阵本身的尺寸会依图像的不同而不同,通常比矩阵头的尺寸大数个数量级。因此,当在程序中传递图像并创建拷贝时,大的开销是由矩阵造成的,而不是信息头。OpenCV是一个图像处理库,囊括了大量的图像处理函数,为了解决问题通常要使用库中的多个函数,因此在函数中传递图像是家常便饭。同时不要忘了我们正在讨论的是计算量很大的图像处理算法,因此,除非万不得已,我们不应该拷贝 大 的图像,因为这会降低程序速度。
为了搞定这个问题,OpenCV使用引用计数机制。其思路是让每个 Mat 对象有自己的信息头,但共享同一个矩阵。这通过让矩阵指针指向同一地址而实现。而拷贝构造函数则 只拷贝信息头和矩阵指针 ,而不拷贝矩阵。
但某些时候你仍会想拷贝矩阵本身(不只是信息头和矩阵指针),这时可以使用函数 clone() 或者 copyTo() 。
- OpenCV函数中输出图像的内存分配是自动完成的(如果不特别指定的话)。
- 使用OpenCV的C++接口时不需要考虑内存释放问题。
- 赋值运算符和拷贝构造函数( ctor )只拷贝信息头。
- 使用函数 clone() 或者 copyTo() 来拷贝一副图像的矩阵。
Mat::ptr
ptr API文档
Returns a pointer to the specified matrix row
返回指向指定矩阵行的指针
Mat::channels
channels API文档
Returns the number of matrix channels.
对channels(通道)的理解可能会比较抽象一些,可以参考下列链接:
《图像的通道(channels)问题》
API
imread
imread API文档
imread:读取图片文件,并按照一定的格式将其返回(Mat对象)
C++: Mat imread(const string& filename, int flags=1 )
Python: cv2.imread(filename[, flags]) → retval
C: IplImage cvLoadImage(const char filename, int iscolor=CV_LOAD_IMAGE_COLOR )
C: CvMat cvLoadImageM(const char filename, int iscolor=CV_LOAD_IMAGE_COLOR )
Python: cv.LoadImage(filename, iscolor=CV_LOAD_IMAGE_COLOR) → None
Python: cv.LoadImageM(filename, iscolor=CV_LOAD_IMAGE_COLOR) → None
Parameters:
- filename – Name of file to be loaded.
- flags –Flags specifying the color type of a loaded image:
- CV_LOAD_IMAGE_ANYDEPTH - If set, return 16-bit/32-bit image when the input has the corresponding depth, otherwise convert it to 8-bit.
- CV_LOAD_IMAGE_COLOR - If set, always convert image to the color one
- CV_LOAD_IMAGE_GRAYSCALE - If set, always convert image to the grayscale one
0 Return a 3-channel color image.
Note In the current implementation the alpha channel, if any, is stripped from the output image. Use negative value if you need the alpha channel.
- =0 Return a grayscale image.
- <0 Return the loaded image as is (with alpha channel).
cvtColor
cvtColor API文档
对图片进行处理,从一种颜色空间转换到另一种颜色空间(Converts an image from one color space to another.)
- RGB <–> GRAY ( CV_BGR2GRAY, CV_RGB2GRAY, CV_GRAY2BGR, CV_GRAY2RGB )
- RGB <–> CIE XYZ.Rec 709 with D65 white point ( CV_BGR2XYZ, CV_RGB2XYZ, CV_XYZ2BGR, CV_XYZ2RGB )
- RGB <–> YCrCb JPEG (or YCC) ( CV_BGR2YCrCb, CV_RGB2YCrCb, CV_YCrCb2BGR, CV_YCrCb2RGB )
- RGB <–> HSV ( CV_BGR2HSV, CV_RGB2HSV, CV_HSV2BGR, CV_HSV2RGB )
- RGB <–> HLS ( CV_BGR2HLS, CV_RGB2HLS, CV_HLS2BGR, CV_HLS2RGB )
- RGB <–> CIE Lab* ( CV_BGR2Lab, CV_RGB2Lab, CV_Lab2BGR, CV_Lab2RGB )
- RGB <–> CIE Luv* ( CV_BGR2Luv, CV_RGB2Luv, CV_Luv2BGR, CV_Luv2RGB )
- Bayer -> RGB ( CV_BayerBG2BGR, CV_BayerGB2BGR, CV_BayerRG2BGR, CV_BayerGR2BGR, CV_BayerBG2RGB, CV_BayerGB2RGB, CV_BayerRG2RGB, CV_BayerGR2RGB )
split
split API文档
split函数的主要功能是把一个彩色图像分割成3个通道,方便进一步的图像处理,具体说明如下:
split Divides a multi-channel array into several single-channel arrays.
C++: void split(const Mat& mtx, Mat* mv)
C++: void split(const Mat& mtx, vector& mv)
merge
merge API文档
merge可以实现与split相反的操作,简单说明如下:
merge Composes a multi-channel array from several single-channel arrays.
C++: void merge(const Mat* mv, size_t count, OutputArray dst)
C++: void merge(const vector& mv, OutputArray dst)
mixChannels
equalizeHist
equalizeHist API文档
直方图均衡化
将灰度图进行直方图均衡化(直方图均衡化是通过拉伸像素强度分布范围来增强图像对比度的一种方法)
C++: void equalizeHist(InputArray src, OutputArray dst)
Python: cv2.equalizeHist(src[, dst]) → dst
C: void cvEqualizeHist(const CvArr src, CvArr dst)
Parameters:
src – Source 8-bit single channel image.
dst – Destination image of the same size and type as src .
原理:
1,Calculate the histogram H for src .
2,Normalize the histogram so that the sum of histogram bins is 255.
3,Compute the integral of the histogram:
4,Transform the image using H’ as a look-up table: dst(x,y) = H’(src(x,y))
The algorithm normalizes the brightness and increases the contrast of the image.
threshold
- 最简单的图像分割的方法。
- 应用举例:从一副图像中利用阈值分割出我们需要的物体部分(当然这里的物体可以是一部分或者整体)。这样的图像分割方法是基于图像中物体与背景之间的灰度差异,而且此分割属于像素级的分割。
- 为了从一副图像中提取出我们需要的部分,应该用图像中的每一个像素点的灰度值与选取的阈值进行比较,并作出相应的判断。(注意:阈值的选取依赖于具体的问题。即:物体在不同的图像中有可能会有不同的灰度值。
- 一旦找到了需要分割的物体的像素点,我们可以对这些像素点设定一些特定的值来表示。(例如:可以将该物体的像素点的灰度值设定为:‘0’(黑色),其他的像素点的灰度值为:‘255’(白色);当然像素点的灰度值可以任意,但最好设定的两种颜色对比度较强,方便观察结果)
C++: double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type)
Python: cv2.threshold(src, thresh, maxval, type[, dst]) → retval, dst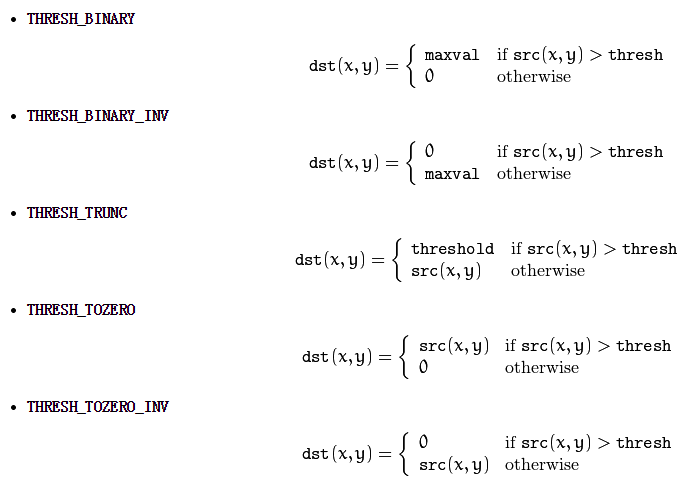
erode
erode API文档
腐蚀操作
C++: void erode(InputArray src, OutputArray dst, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar& borderValue=morphologyDefaultBorderValue() )
Python: cv2.erode(src, kernel[, dst[, anchor[, iterations[, borderType[, borderValue]]]]]) → dst
dilate
dilate API文档
膨胀操作
C++: void dilate(InputArray src, OutputArray dst, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar& borderValue=morphologyDefaultBorderValue() )
Python: cv2.dilate(src, kernel[, dst[, anchor[, iterations[, borderType[, borderValue]]]]]) → dst
open
开运算:开运算是通过先对图像腐蚀再膨胀实现的,能够排除小团块物体(假设物体较背景明亮)。
dst = open(src,element) = dilate( erode(src, element) )
close
闭运算:闭运算是通过先对图像膨胀再腐蚀实现的,能够排除小型黑洞(黑色区域)。
dst = close(src,element) = erode( dilate(src, element) )
形态梯度(Morphological Gradient)
膨胀图与腐蚀图之差,能够保留物体的边缘轮廓。
dst = morph_grad(src,element) = dilate(src, element) - erode(src, element)
顶帽(Top Hat)
原图像与开运算结果图之差。
dst = tophat(src,element) = src - open(src, element) 
黑帽(Black Hat)
闭运算结果图与原图像之差。
dst = blackhat(src,element) = close(src, element) - src
findcontours
Sobel算子
- Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它用来计算图像灰度函数的近似梯度。
- Sobel 算子结合了高斯平滑和微分求导
